底盤製作
1. 將PC板切割為大小為13cm*21cm,並在下圖位置鑽孔
藍點孔徑為3mm,紅點孔徑為4mm
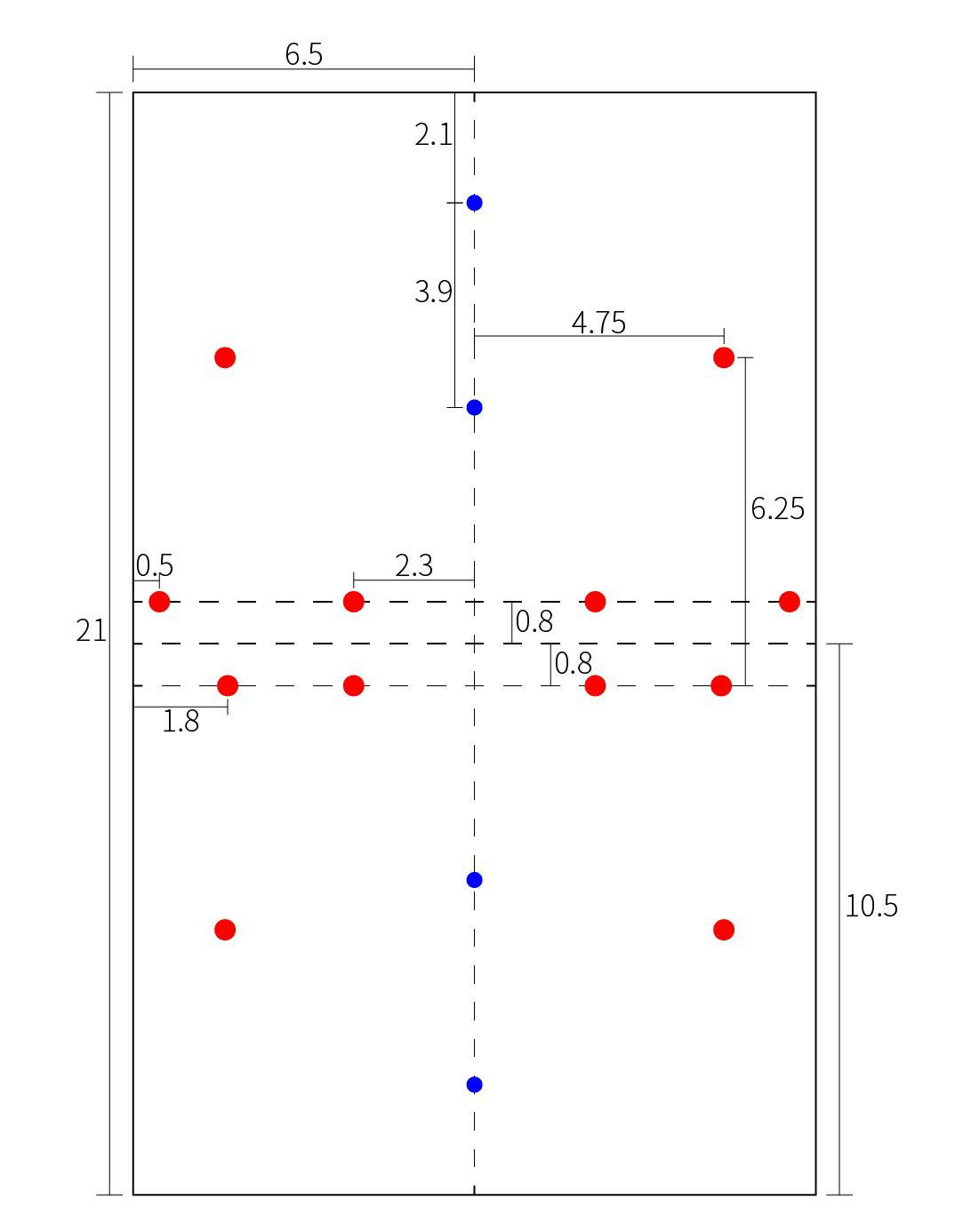
成品示意圖

2. 依照螺絲、墊片、滾珠輪、銅柱、PC板、螺絲的順序將兩組滾珠輪裝上
成品示意圖

3. 使用源達科技"4WD 智能小車底盤 越野型 直流減速電機 超大型底盤(適用JGA25-371)"套件中的鋁合金支架
將長條形和L形支架固定於PC板上
成品示意圖

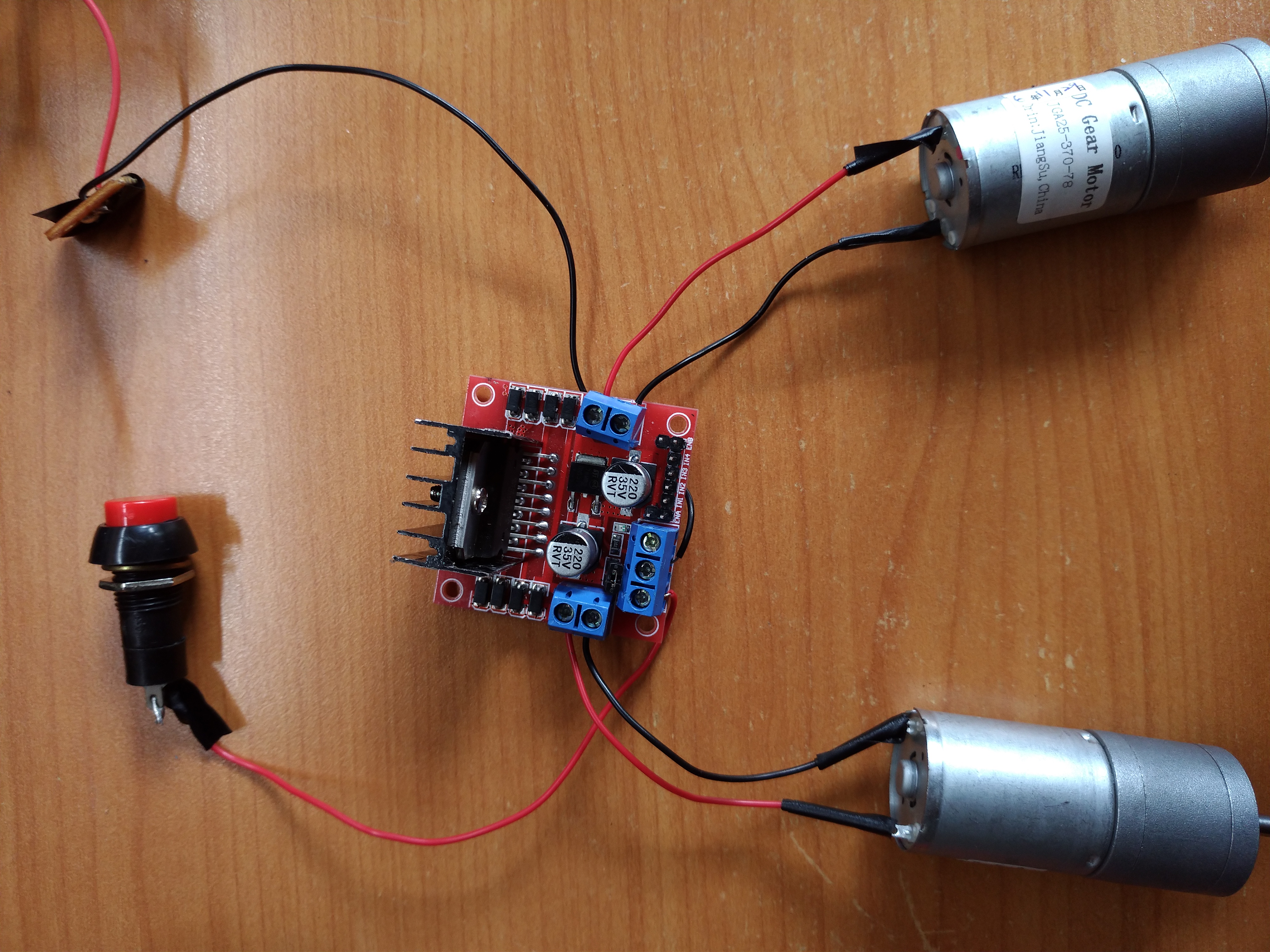
4. 將L298N兩對輸出各自接上JGA25-371直流馬達,並在電源供應端先接上導線,正極接上開關,負極接上小塊麵包板作為共地
成品示意圖
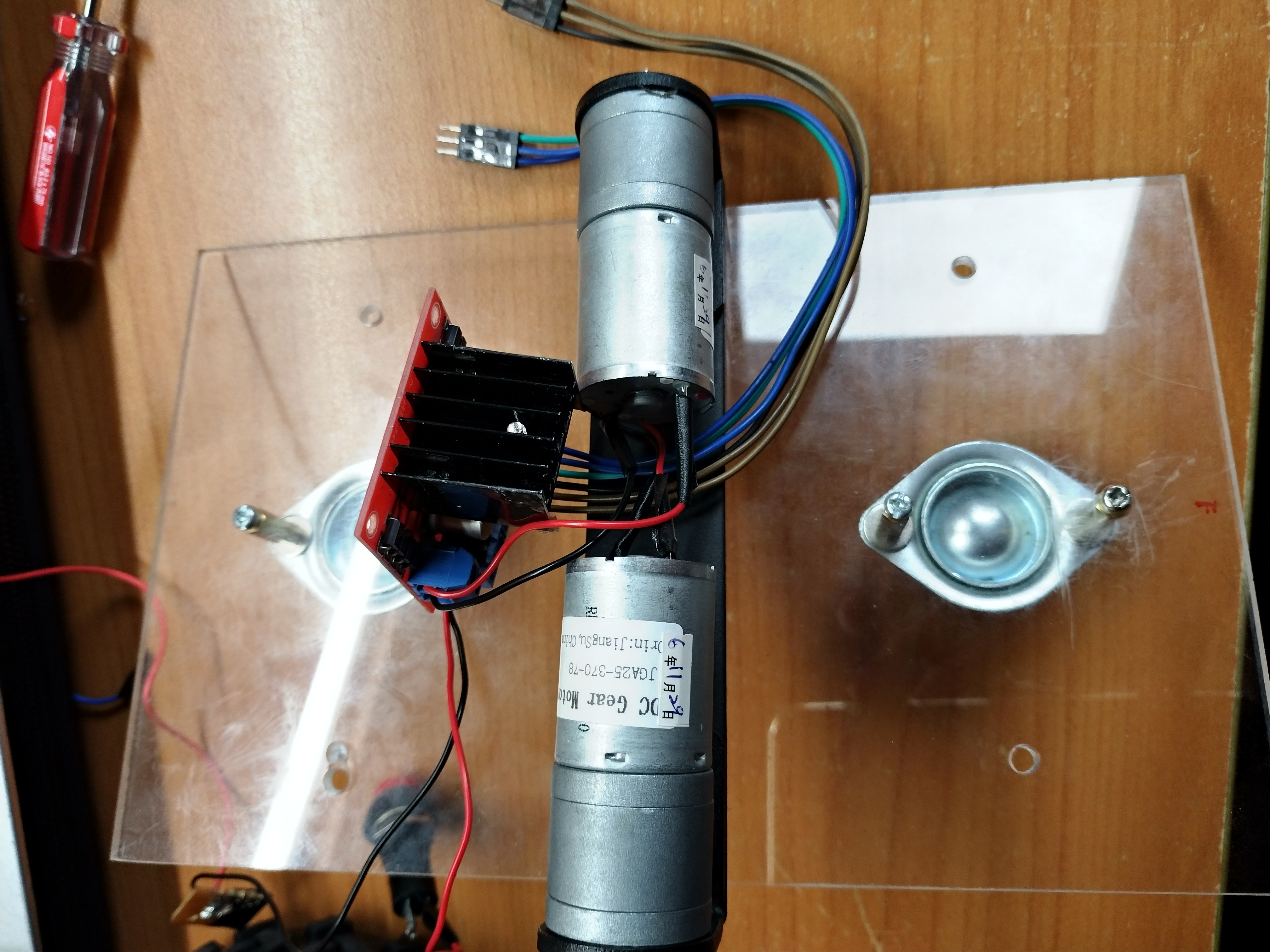
5. 將馬達固定在L形支架上,並將L298N控制腳位in1~4、enA及enB接上杜邦線
成品示意圖
車體製作
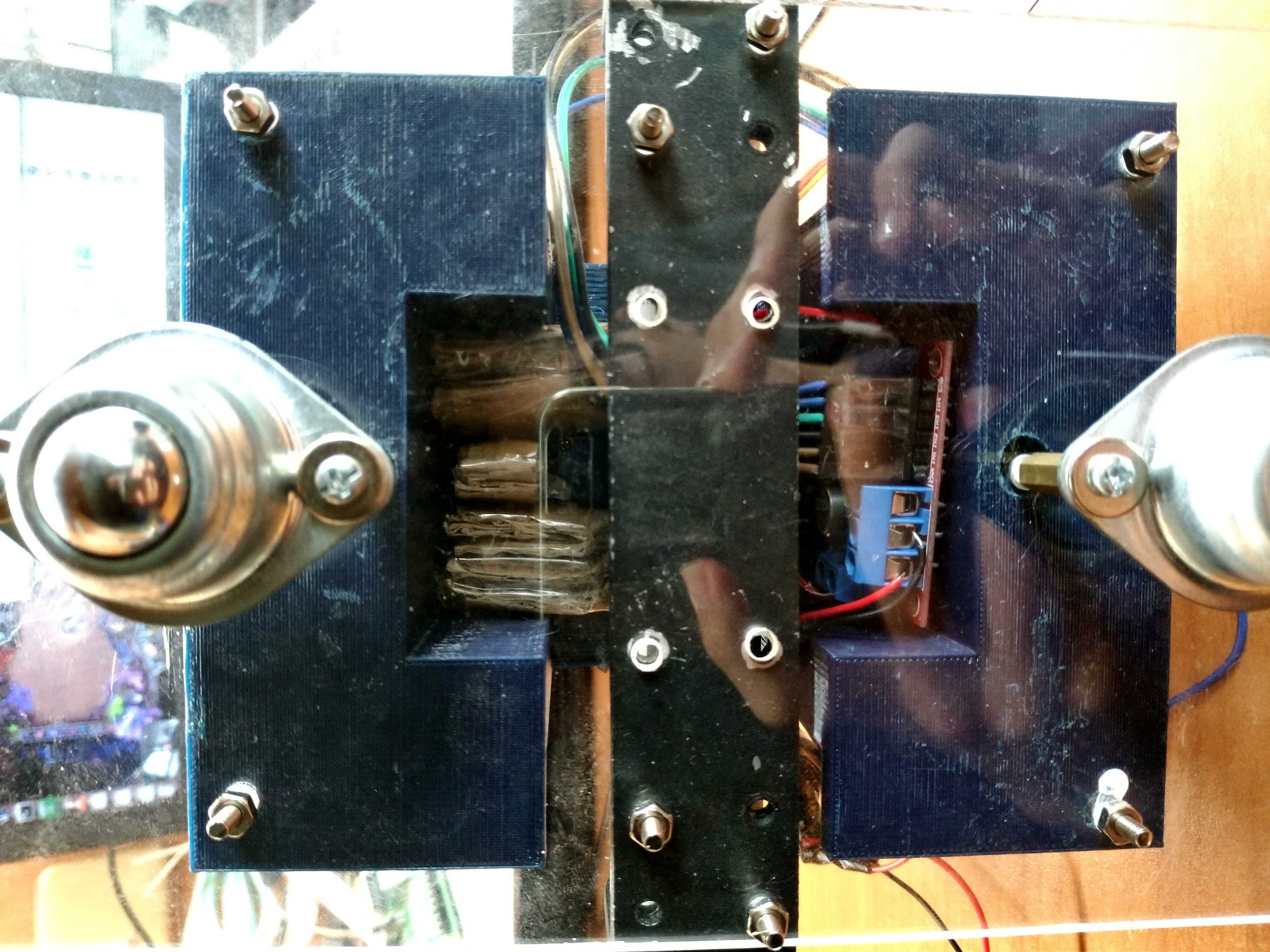
1. 將軸承放置在車體與雲台中間
車體模型參考car_button.stl
雲台模型參考car_top.stl
成品示意圖

※備註:必須在底部先鑽洞讓車底跟底盤可以用螺絲連接,以及讓滾珠輪的螺絲不會卡住;或是直接修改模型檔案在正確位置挖洞※
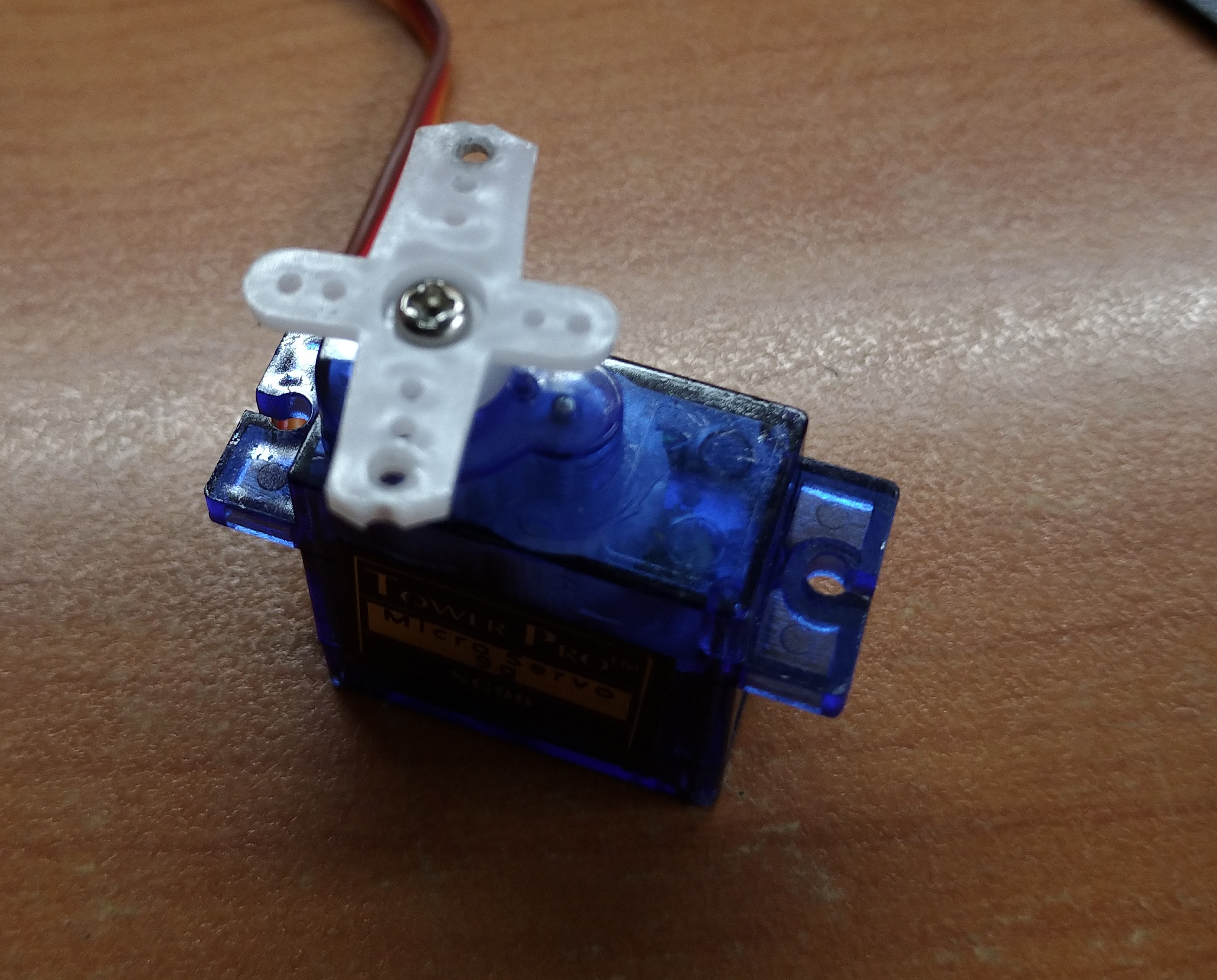
2. SG90伺服馬達鎖上十字形支架,並且修改長度長徑小於2.3cm
成品示意圖
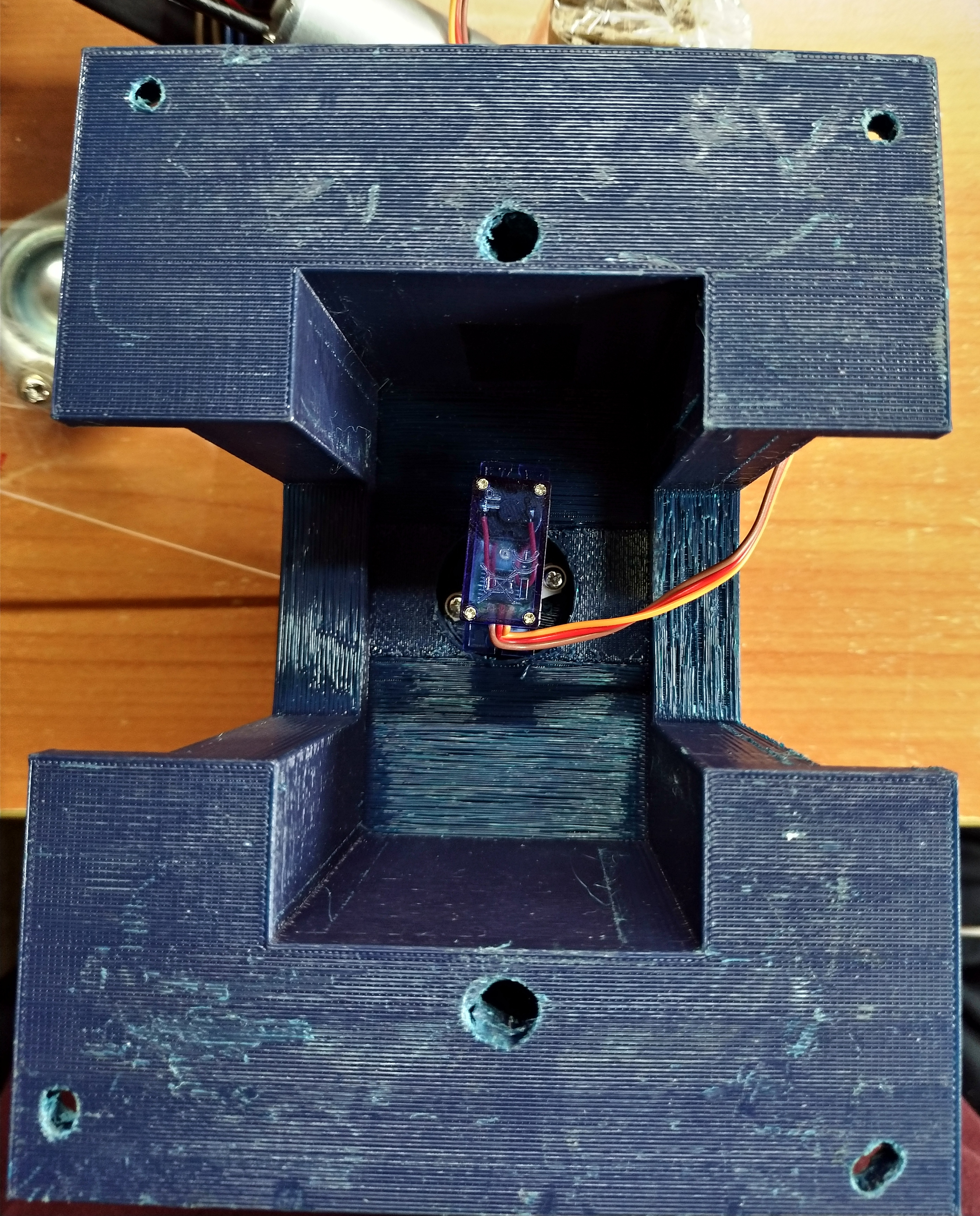
3. 將SG90伺服馬達固定在雲台支柱下方
成品示意圖
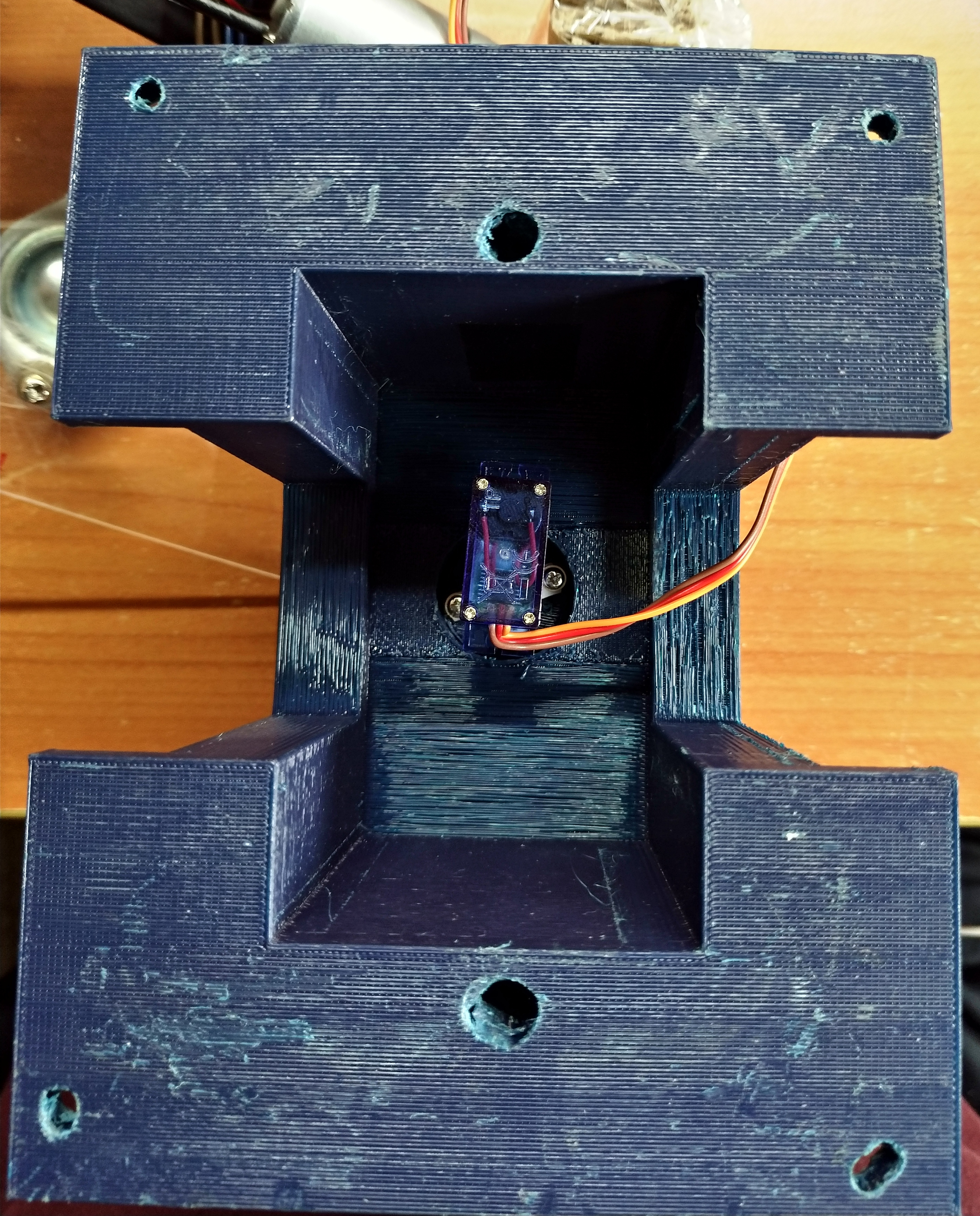
※備註:必須使用厚紙板填補縫隙讓伺服馬達不易偏移;或是直接修改模型檔案製作凹槽※

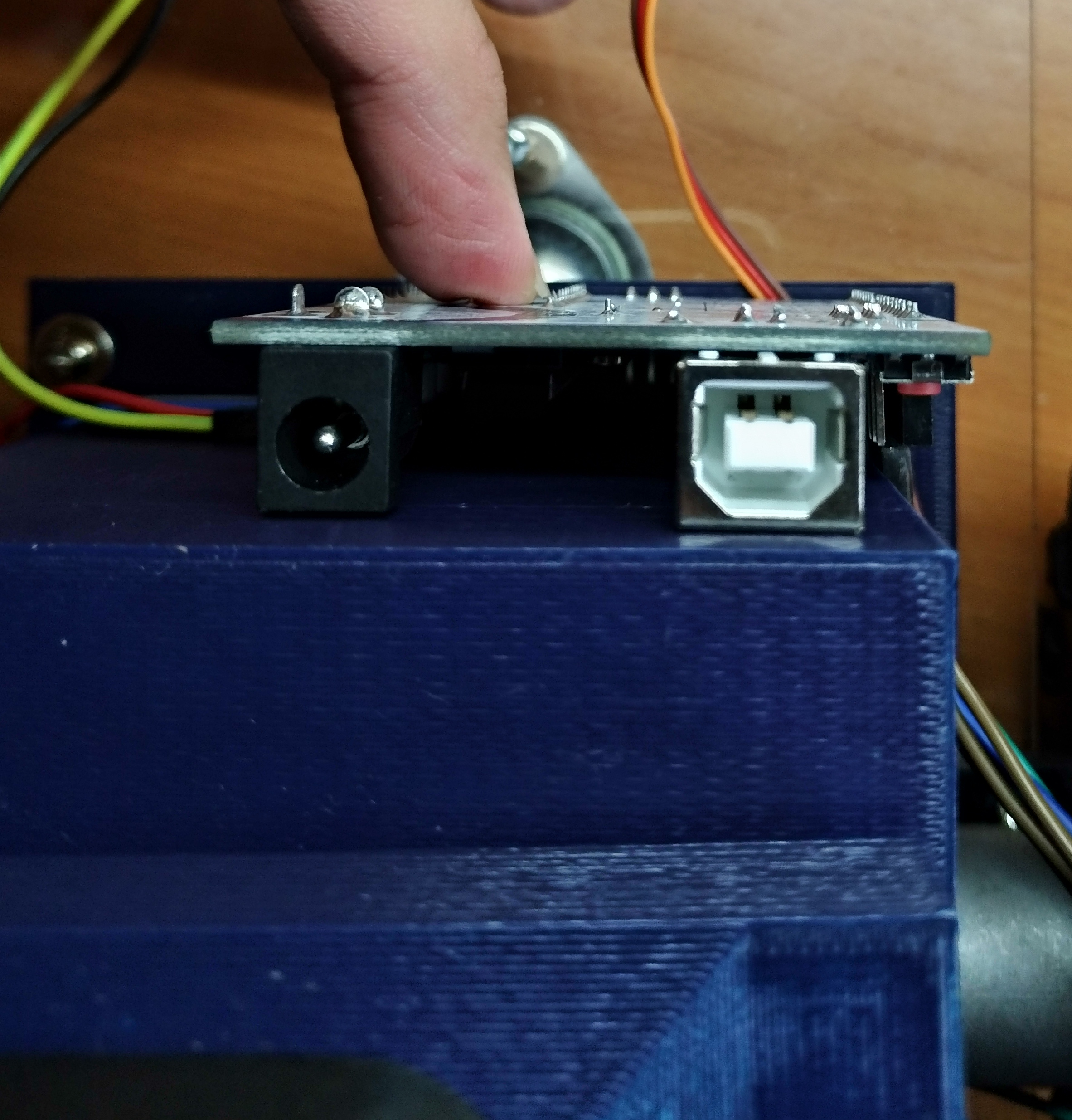
組合
1. 將底盤與車體組合,要注意不要壓住任何導線
成品示意圖
2. 連接Arduino的配線,連接如下
digital12 =====> SG90訊號線(橘色)
digital11 =====> L298N控制腳位enB
digital10 =====> L298N控制腳位in4
digital9 =====> L298N控制腳位in3
digital7 =====> L298N控制腳位in2
digital6 =====> L298N控制腳位in1
digital5 =====> L298N控制腳位enA
5V =====> SG90電源線(紅色)
GND =====> SG90接地線(棕色)
GND =====> 小塊麵包板共地
analog4 =====> I2C SDA訊號(RPI3 GPIO0(pin3))
analog5 =====> I2C SCL訊號(RPI3 GPIO1(pin5))
成品示意圖
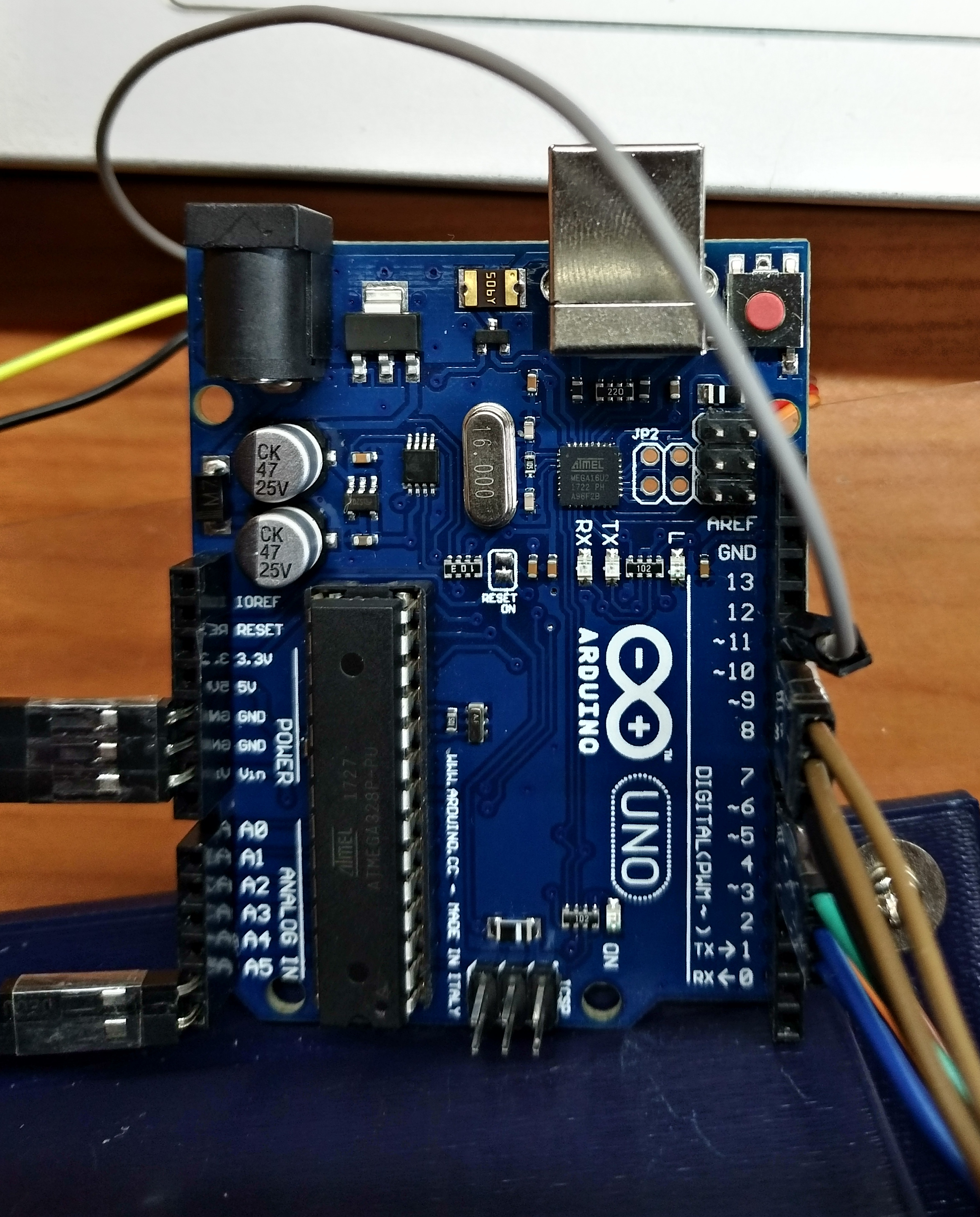
3. 將Arduino固定在車體左後側
成品示意圖
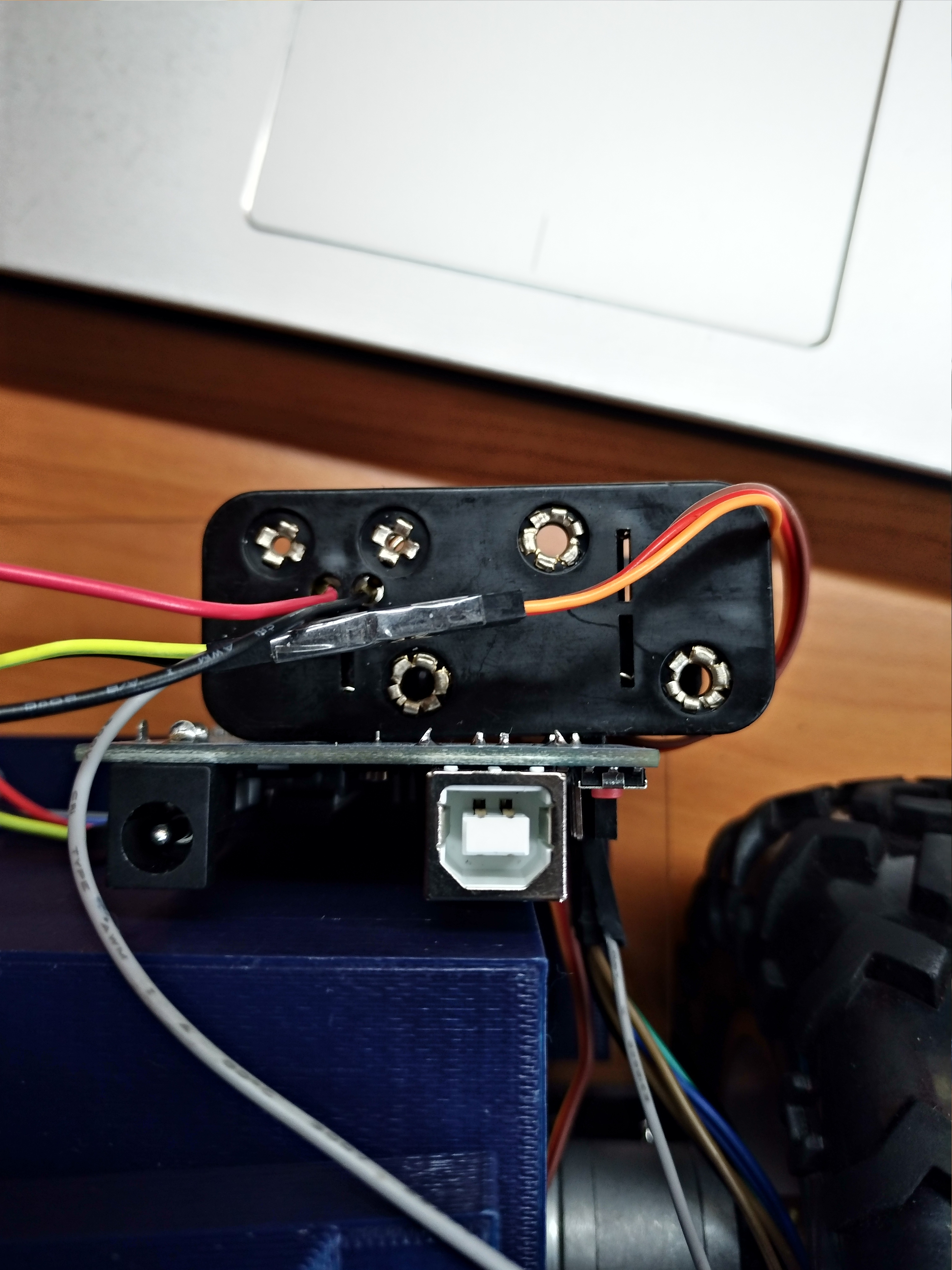
4. 連接8顆電池座配線,正極連接到開關(開關另一側連接到L298N電源供應端正極),負極連接到小塊麵包板共地,並將電池座抵在Arduino後方
成品示意圖
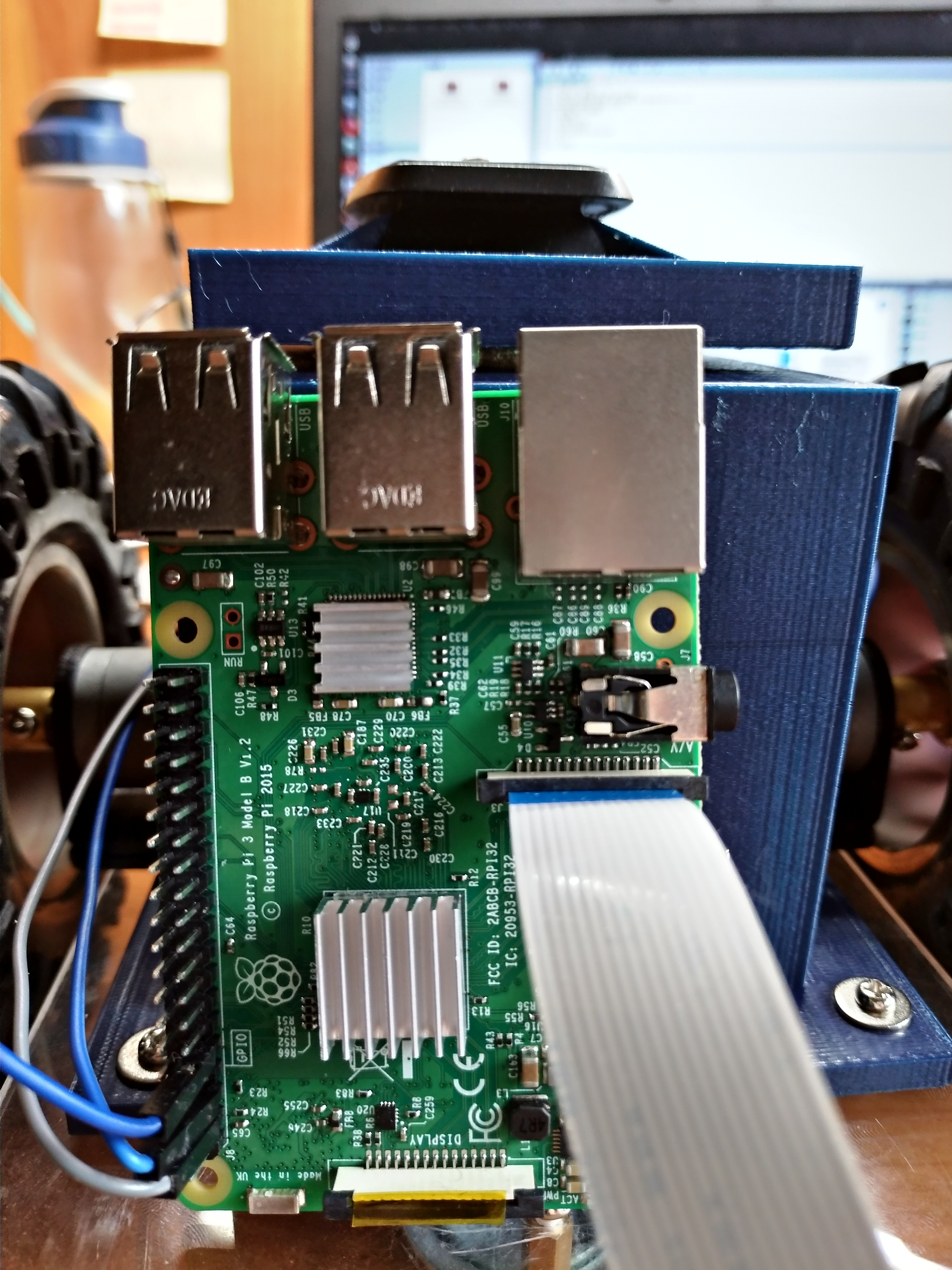
5. 連接RPI3的配線,連接如下
RPI3 GPIO0(pin3) =====> I2C SDA訊號(Arduino analog4)
RPI3 GPIO0(pin5) =====> I2C SCL訊號(Arduino analog5)
RPI3 GND(pin9) =====> 小塊麵包板共地
6. 將RPI3固定在車體前側
成品示意圖
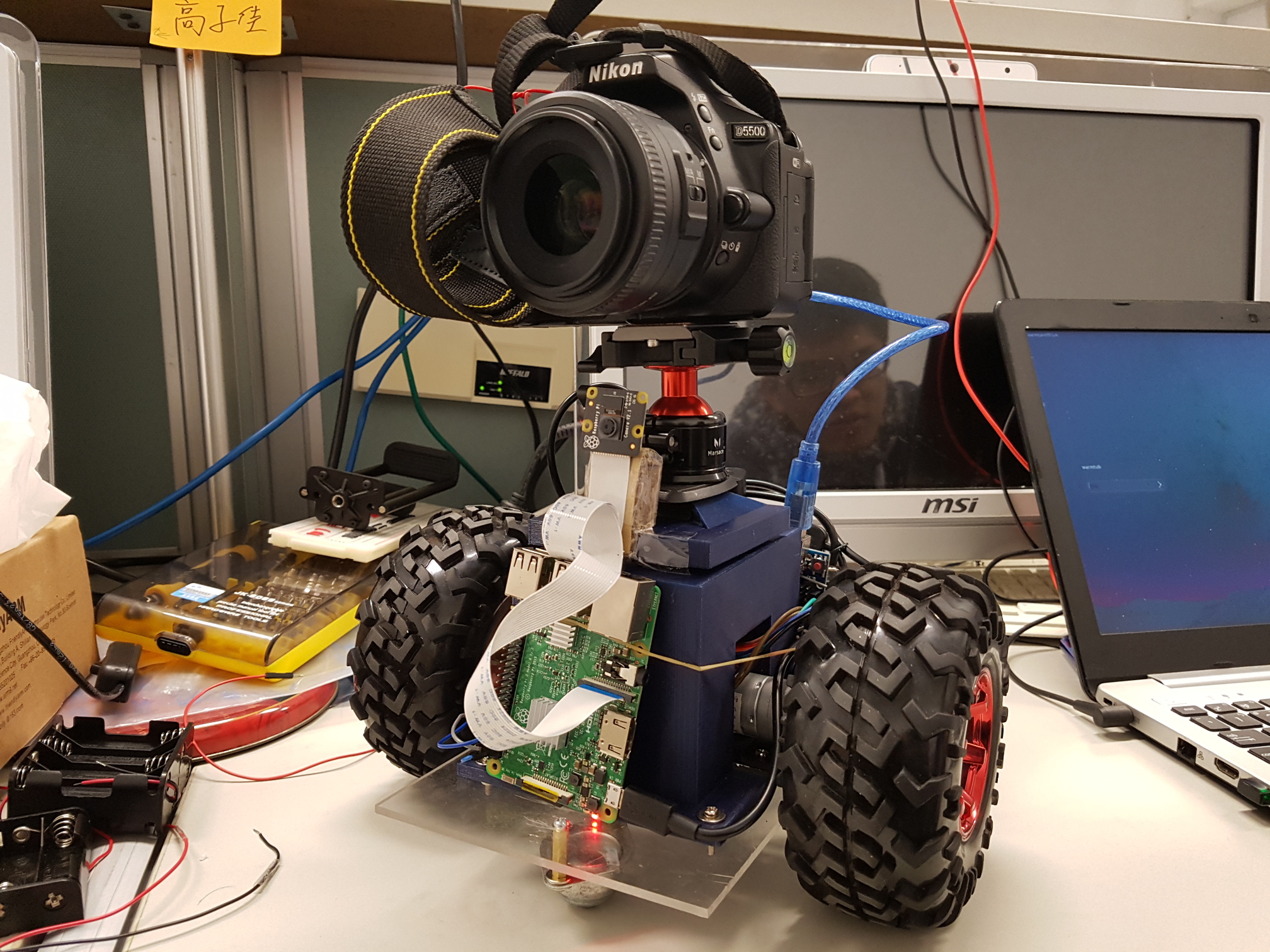
7. 將RPI3鏡頭固定於雲台上
8. 使用行動電源替Arduino與RPI3供電
9. 架上您的攝影裝備
大功告成!!!